
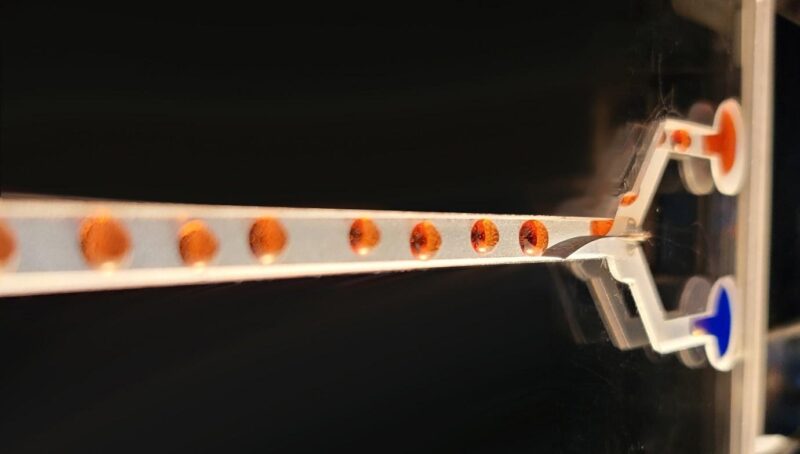
Para peneliti telah mengembangkan saklar fluidik lunak menggunakan otot buatan polimer ionik, yang mampu beroperasi dengan daya sangat rendah dan menghasilkan gaya 34 kali lipat beratnya. Terobosan ini menawarkan aplikasi potensial dalam robotika lunak, perangkat biomedis, dan mikrofluida dengan mengontrol aliran fluida secara tepat di ruang sempit. Gambar di atas menggambarkan pemisahan tetesan cairan menggunakan saklar cairan lunak dengan tegangan sangat rendah. Kredit: KAIST Soft Robotics & Intelligent Materials Lab
Robot lunak, peralatan medis, dan perangkat wearable kini sudah menjadi hal yang lumrah dalam rutinitas kita sehari-hari. Peneliti di KAIST telah menciptakan saklar cairan yang menggunakan otot buatan polimer ionik. Sakelar ini berfungsi dengan daya yang sangat rendah sekaligus menghasilkan gaya 34 kali lipat dari beratnya sendiri. Sakelar fluida dirancang untuk mengarahkan aliran fluida, mengarahkannya ke arah tertentu untuk memulai gerakan yang berbeda.
KAIST (Presiden Kwang-Hyung Lee) mengumumkan pada tanggal 4 Januari bahwa tim peneliti di bawah Profesor IlKwon Oh dari Departemen Teknik Mesin telah mengembangkan saklar fluidik lunak yang beroperasi pada tegangan sangat rendah dan dapat digunakan di ruang sempit.
Otot Buatan dalam Teknologi Modern
Otot buatan meniru otot manusia dan memberikan gerakan yang fleksibel dan alami dibandingkan motor tradisional, menjadikannya salah satu elemen dasar yang digunakan dalam robot lunak, perangkat medis, dan perangkat yang dapat dikenakan. Otot buatan ini menciptakan gerakan sebagai respons terhadap rangsangan eksternal seperti listrik, tekanan udara, dan perubahan suhu, dan untuk memanfaatkan otot buatan, penting untuk mengontrol gerakan tersebut dengan tepat.
Sakelar berdasarkan motor yang ada sulit digunakan di ruang terbatas karena kekakuan dan ukurannya yang besar. Untuk mengatasi masalah ini, tim peneliti mengembangkan aktuator lunak elektro-ionik yang dapat mengontrol aliran fluida sekaligus menghasilkan gaya dalam jumlah besar, bahkan dalam pipa sempit, dan menggunakannya sebagai saklar fluida lunak.
Sintesis dan penggunaan pS-COF sebagai host elektroda-elektrolit umum untuk sakelar fluida lunak elektroaktif. A) Skema sintesis pS-COF. B) Diagram skema prinsip pengoperasian saklar lunak elektrokimia. C) Diagram skema penggunaan soft switch elektrokimia berbasis pS-COF untuk mengontrol aliran fluida dalam operasi dinamis. Kredit: KAIST Soft Robotics & Intelligent Materials Lab.
Otot buatan polimer ionik yang dikembangkan oleh tim peneliti terdiri dari elektroda logam dan polimer ionik, serta menghasilkan gaya dan gerakan sebagai respons terhadap listrik. Kerangka organik kovalen polisulfonasi (pS-COF) yang dibuat dengan menggabungkan molekul organik pada permukaan elektroda otot buatan digunakan untuk menghasilkan jumlah gaya yang mengesankan dibandingkan dengan beratnya pada daya yang sangat rendah (~0,01V).
Prestasi Penelitian
Hasilnya, otot buatan yang dibuat setipis rambut dengan ketebalan 180 µm ini menghasilkan gaya lebih dari 34 kali lebih besar dari bobot ringannya 10 mg untuk memulai gerakan halus. Melalui ini, tim peneliti mampu mengontrol secara tepat arah aliran fluida dengan daya rendah.
Profesor IlKwon Oh, yang memimpin penelitian tersebut, mengatakan, “Saklar fluida lunak elektrokimia yang beroperasi pada daya sangat rendah dapat membuka banyak kemungkinan di bidang robot lunak, elektronik lunak, dan mikrofluida berdasarkan kontrol fluida.” Ia menambahkan, “Dari serat pintar hingga perangkat biomedis, teknologi ini berpotensi untuk segera digunakan di berbagai lingkungan industri karena dapat dengan mudah diterapkan pada sistem elektronik ultra-kecil dalam kehidupan kita sehari-hari.”
Referensi: “Kerangka organik kovalen polisulfonasi sebagai host elektroda aktif untuk tamu kation bergerak dalam aktuator lunak elektrokimia” oleh Saewoong Oh, Sanghee Nam, Xiangrong Zeng, Hyunjoon Yoo, Rassoul Tabassian dan Il-Kwon Oh, 13 Desember 2023, Kemajuan dalam Sains.
DOI: 10.1126/sciadv.adk9752
Penelitian ini dilakukan dengan dukungan dari Proyek Dukungan Ilmuwan Utama Yayasan Penelitian Nasional Korea (Kelompok Penelitian Kreatif) dan Proyek Percontohan Konvergensi Masa Depan.
NewsRoom.id













